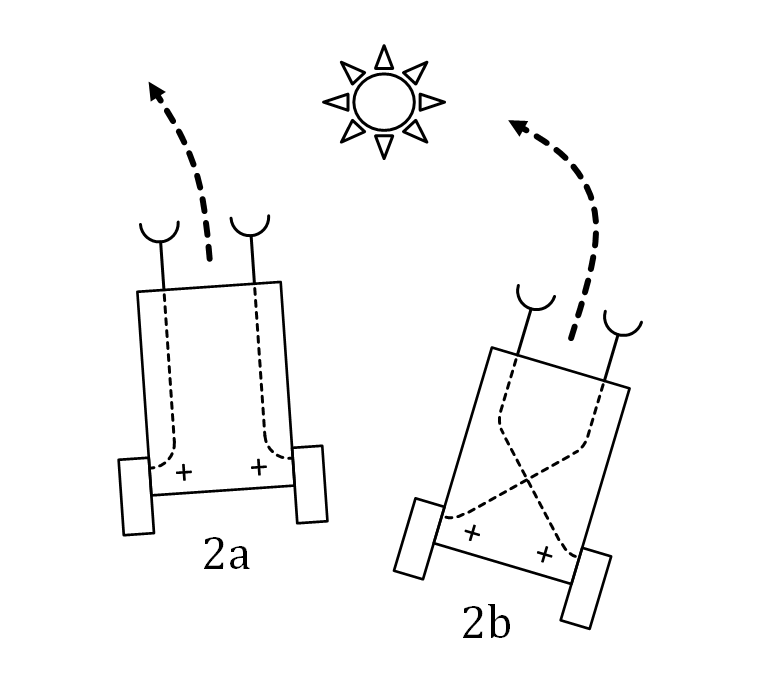
To create a Braitenberg Vehicle useing the Pololu 3pi platform. "A Braitenberg vehicle is an agent that can autonomously move around based on its sensor inputs. It has primitive sensors (measuring some stimulus at a point) and wheels (each driven by its own motor) that function as actuators or effectors. A sensor, in the simplest configuration, is directly connected to an effector, so that a sensed signal immediately produces a movement of the wheel." (from wikipedia). What makes Braitenberg Vehicles an interesting experiment is the way in which our perceived interpretation of the robots behavior is affected by the transfer function that relates a sensor value (input) to a motor speed (output). In the image blow, the semi-circles in front of the vehicle represent light sensors, the two vertical rectangles in the bottom of each vehicle represent the wheels, and the dotted lines represent the mapping. The left vehicle (2a) escapes from light, whereas the one on the right (2b) chases the light source.